Den Hartog’s Mechanics
A web-based solutions manual for statics and dynamics
The book

Your host

drdrang at gmail
Problems solved:
1–.
If you're having trouble seeing the equations, look here for instructions on getting the math fonts.
This work is licensed under a Creative Commons Attribution-Share Alike 3.0 Unported License.
Problem 31
The first thing to notice in this problem is that the two arms of the toggle are two-force members (which you may recall from Problem 23), so the forces transmitted by those arms must be aligned with them. We draw the free-body-diagram of the rolling block at the right end of the toggle like this
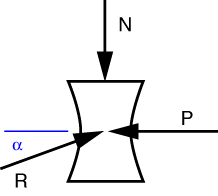
The horizontal equilibrium equation is
which tells us that R = P/\cos\alpha. We can now draw an FBD of the hinge at the center of the toggle
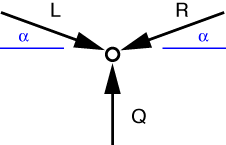
The equilibrium equations for the hinge are
and
From the first of these, and our previous solution, we see that L = R = P/\cos\alpha. Plugging this into the second equation gives us
which is the solution at the back of the book. Notice that for small angles, Q will be much less than P. Since toggles like this are usually set up with Q as the applied force and P as the resistance, you can see how this mechanism is a great force multiplier.
Last modified: January 22, 2009 at 8:32 PM.