Den Hartog’s Mechanics
A web-based solutions manual for statics and dynamics
The book

Your host

drdrang at gmail
Problems solved:
1–.
If you're having trouble seeing the equations, look here for instructions on getting the math fonts.
This work is licensed under a Creative Commons Attribution-Share Alike 3.0 Unported License.
Problem 42
For part a), we draw the free-body diagram of the plate,
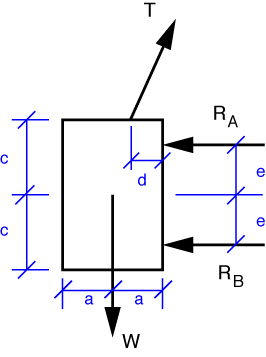
and construct the equilibrium equations from it. Because R_A and R_B are horizontal, the vertical equilibrium equation will have just one unknown, T, in it:
The complicated fraction in the term with T is the cosine of the angle between the rope and the wall. Solving for T, we get
To get R_A, we take moments about the point B, where R_B intersects the right edge of the plate.
The W in the first term is the vertical component of T, and the term inside the big parentheses is the horizontal component of T. Solving for R_A, we get
which is, I think, a bit simpler than the answer in the back of the book, but algebraically equivalent.
To get R_B, we can look at either horizontal equilibrium or moment equilibrium about point A, the upper wheel. I chose horizontal equilibrium:
So, plugging in the previous solution for R_A and solving, we get
or, after simplifying
which is algebraically equivalent to the answer in the back of the book. (Den Hartog uses L for the lower force and l for the length of the rope. Because I think a lower case l looks too much like the numeral 1, I’ve used L for the rope length and R_B for the lower force.)
We get the answer to part b) by setting the expression for R_B equal to zero. The W/2e term cancels out and we’re left with the expression in the big parentheses:
This can be rearranged to the answer in the book:
The geometric interpretation of this expression is that the two blue triangles in the figure below are similar. The numerators represent the horizontal legs, and the denominators represent the vertical legs. If this is the case, the lines of action of the three forces meet at a point, which is an equilibrium requirement for a body acted upon by exactly three forces.
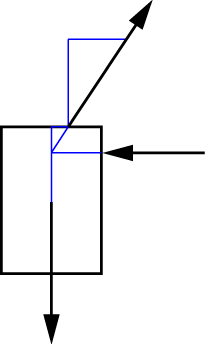
If we had done part b) first, we could have started with the requirement that the three forces meet at a point and derived the equation from that requirement.
Last modified: January 22, 2009 at 8:32 PM.