Den Hartog’s Mechanics
A web-based solutions manual for statics and dynamics
The book

Your host

drdrang at gmail
Problems solved:
1–.
If you're having trouble seeing the equations, look here for instructions on getting the math fonts.
This work is licensed under a Creative Commons Attribution-Share Alike 3.0 Unported License.
Problem 45
The free-body diagrams of the gears look like this.
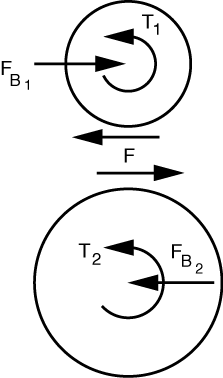
Newton’s Third Law is the reason the two perimeter forces have the same magnitude and opposite direction.
From the upper gear, we calculate the gear-to-gear force by taking moments about the center:
so F = T_1/r_1. Horizontal equilibrium tells us F_{B_1} = F = T_1/R_1.
We now get the resisting torque, T_2, by considering the lower gear. Taking moments about its center,
and therefore
Horizontal equilibrium of the lower gear gives us F_{B_2} = F = F_{B_1} = T_1/r_1 = T_2/r_2.
The FBD of the frame is
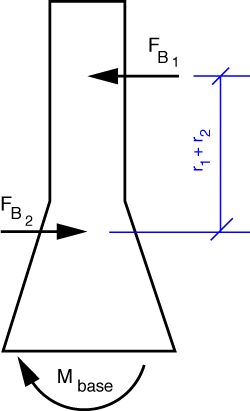
and because the two bearing forces are equal in magnitude, opposite in direction, and act along different lines of action, they form a couple of magnitude
Moment equilibrium of the frame tell us this couple is resisted by the reaction at the base, so M_{base} = T_1 + T_2.
We could have gotten this last answer by considering the frame and gears as a whole. The gear-to-gear and bearing forces would then be internal to the system and not appear in the equilibrium equations. All that would be left are the two applied torques and the reaction moment at the base.
By the way, the drawing in the book may give you the impression that the two torques, T_1 and T_2, act in opposite directions. They don’t. T_1 is counterclockwise because it is trying to turn the upper gear counterclockwise, Under the influence of T_1 and the gear-to-gear force it creates, the lower gear is trying to turn clockwise. T_2 is counterclockwise because it is resisting the clockwise rotation of the lower gear.
Last modified: January 22, 2009 at 8:32 PM.